

Riipusliike

- 4666
- 372
- Alonzo Kirlin
Mikä on riipusliike?
Hän riipusliike Se on enemmän tai vähemmän raskas esine, nimeltään heiluri, joka on ripustettu kevyellä köydellä tai sauvalla, kiinnitetty toiseen päähänsä.
Heilurille annetaan alkuperäinen impulssi ja sen annetaan värähdellä, tällä tavalla esine kuvaa edestakaisin kaaria. Tämä on heilurikellojen, keinuvien, keinutuolien ja Metronomit heiluri, jota käytetään merkitsemään aikoja musiikissa.
Pendulum värähtely, nopeuden ja kiihtyvyyden osoittaminen (Wikipedia.org) Sanotaan, että vuoteen 1581 mennessä Galileo Galilei havaitsi Pisan katedraalin lampun heijastuksen havaitsemalla, että vaikka kynttilänjalkaväästyksen amplitudi laski kitkan takia, ei keston keston keston keston keston kesto syklin kesto.
Tämä kiinnitti Galileon huomion, joka päätti jatkaa tutkimusta ja päätti, että heilurijakso ei riipu taikinasta, vaan köyden pituuden neliöjuurista, kuten myöhemmin nähdään.
Pendulaarisen liikkeen ominaisuudet
Heiluri on erittäin helppo rakentaa, koska se riittää puuvillalangan ripustettaessa ja pitää toisessa päässä sormillasi tai sitoa se tukeen, kuten kynsi.
Pienen alkuperäisen impulssin jälkeen paino on vastuussa heilurin värähtelyn pitämisestä, vaikka kitka vähentää liikkeen amplitudia, kunnes lopulta lakkaa.
Pendulaarisen liikkeen pääpiirteenä on toistuva, koska se on heilahtelu. Nyt tutkimuksen helpottamiseksi on kätevää tehdä joitain yksinkertaistuksia keskittyä yksinkertaisempaan malliin, nimeltään Yksinkertainen heiluri.
Yksinkertainen heiluri
 Swingissä oleva lapsi voidaan mallintaa yksinkertaisena heilurina
Swingissä oleva lapsi voidaan mallintaa yksinkertaisena heilurina Se on ihanteellinen järjestelmä, joka koostuu plumbista, jota pidetään täsmällisenä massana m, Pitkäaikaisen kevyen ja vaikuttamattoman köyden alainen Lens. Tämän järjestelmän ominaisuudet ovat:
- On toistuva ja säännöllinen liike, joka koostuu edestakaisin säteen ympärysmiipan kaarista, joka on yhtä suuri kuin L.
- Ei ota kitkaa huomioon.
- Liikkeen amplitudi on pieni (< 5º).
- Ajanjakso on riippumaton massasta m, Ja se riippuu yksinomaan pituudesta Lens heiluri.
Kaavat ja yhtälöt
Seuraava on yksinkertainen heilurin kaavio, jolla kaksi voimaa toimivat: paino P suuruusluokkaa Mg, joka on suunnattu pystysuunnassa ja jännitys T Köydellä. Niitä ei pidetä kitkana.
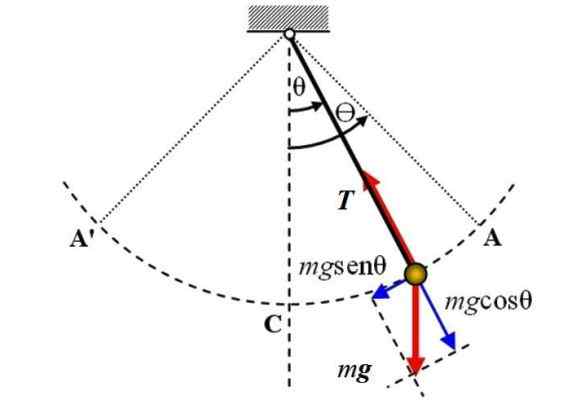 Ilmainen kehon kaavio yksinkertaisesta heilurista. Lähde: Wikimedia Commons.
Ilmainen kehon kaavio yksinkertaisesta heilurista. Lähde: Wikimedia Commons. Referenssiakseli on pystysuuntainen akseli ja vastaa aseman θ = 0 kanssa, sieltä kulman siirtymä θ mitataan joko yhteen suuntaan tai toiseen. Merkki + voidaan osoittaa oikealle kuvalle.
Heilurin liikkeen tutkimiseksi koordinaattijärjestelmä valitaan itse heilurin alkuperän kanssa. Tällä järjestelmällä on tangentiaalinen koordinaatti heilurin kuvaamassa A'CA -ympärysmittakaarissa, samoin kuin radiaalikoordinaatti, joka on suunnattu kohti radan keskustaa.
Kuvassa esitetyllä hetkellä heiluri on siirtymässä oikealle, mutta painovoiman tangentiaalinen komponentti, nimeltään ft, on vastuussa sen palauttamisesta. Hahmosta varoitetaan, että tämä komponentti on järkevää liikettä ristiriidassa.
Mitä tulee köyden jännitykseen, se on tasapainossa painon komponentin kanssa Mgcosθ.
Nettovoima on silloin nimeltään ft Ja Newtonin toisen lain mukaan se on yhtä suuri kuin tuote massa × kiihtyvyys, Ja tämä puolestaan on toinen johdettu lineaarisesta siirrosta s, Mikä on heilurin kulkemaa kaaria. Niin:

Kulman siirtymä
Yhtälö on ilmaistava yhtenä muuttujan perusteella, muistaen, että kulman siirtymä θ ja kuljetettu kaari liittyvät yhtälöön:
Se voi palvella sinua: termodynamiikan toinen laki: kaavat, yhtälöt, esimerkits = l.θ
Massa peruutetaan molemmilla puolilla ja jos amplitudi on pieni, kulma θ myös seuraava lähestymistapa on kelvollinen:
sin θ ≈ θ
Tällä saadaan seuraava differentiaaliyhtälö muuttujalle θ (t):

\theta)
Tämä yhtälö on erittäin helppo ratkaista, koska sen ratkaisu on funktio, jonka toinen johdannainen on itse funktio. Vaihtoehtoja on kolme: kosiini, yksi rinta tai eksponentiaali. Kosinifunktio valitaan kulman siirtymiseen θ (t), koska se on hyvin tunnettu ja helppo käsitellä toimintoa.
Lukija voi tarkistaa kahdesti, että seuraava funktio täyttää differentiaaliyhtälön:
θ (t) = θm cos (ωt + φ)
Missä θm On suurin kulma, että heiluri liikkuu pystysuoraan ja kulmataajuuteen ω on:

Ajanjaksoyhtälö
Liikkeen T -ajanjakso on jakson suorittamiseen tarvittava aika, ja se on määritelty:

Korvaaminen ω:

Kuten aiemmin vahvistettiin, ajanjakso ei riipu heilurin massasta, vaan vain sen pituudesta.
Esimerkkejä riipusliikkeestä
Sykkeen mitta
Galileon tapaus mitata ihmisten syke, säätäen heilurin pituutta, kunnes ajanjakso ihmisen sydämen pulsaatioilla on sammutettu.
Heilurikello
Tämä on epäilemättä yksi tutuimmista riipusliikkeen esimerkeistä. Pendulum Watches -valmistuksessa on sekä tiedettä että taidetta. Alankomaiden fyysikko Christian Huygens (1629-1695) kehitti ensimmäisen heilurikellon vuonna 1656, joka perustuu Galileon vuosia sitten tekemään tutkimukseen.
Voi palvella sinua: aaltoileva optiikkaFoucaultin heiluri
Foucault -heiluri. Lähde: Wikimedia Commons. Se on jonkin verran erilainen heiluri kuin yllä kuvattu, koska se pystyy kääntymään mihin tahansa pystysuoraan tasoon. Sen on luonut ranskalainen fyysikko Léon Foucault (1819-1868), ja sitä käytetään visualisoimaan maan kierto.
Liikuntaa
Yksinkertainen heiluri kulkee joka 0.5 s tasapainoa varten. Mikä on langan pituus?
Ratkaisu
Koska ajanjakso on aika, joka kuluu täydellisen syklin suorittamiseen, jossa se kulkee kahdesti tasapainon asennon läpi: yksi ensin ja toinen selkä, sitten: sitten:
T = 2 × 0.5 s = 1 s
:
Langan pituus L puhdistetaan:
^24\pi&space;^2=&space;0.25&space;\:&space;m)
Lanka mittaa 0.25 m tai 25 cm pitkä.
Viitteet
- Figueroa, D. (2005). Sarja: Tieteen ja tekniikan fysiikka. Nide 2. Dynaaminen. Toimittanut Douglas Figueroa (USB).
- Giambattista, a. 2010. Fysiikka. Toinen. Ed. McGraw Hill.
- Giancoli, D. 2006. Fysiikka: sovellusten periaatteet. Kuudes. Ed Prentice Hall.
- Katz, D. 2013. Fysiikka tutkijoille ja insinööreille. Perusteet ja yhteydet. Cengage -oppiminen.
- Ritari, r. 2017. Tutkijoiden fysiikka ja tekniikka: strategialähestymistapa. Pearson.