

Antidervatiiviset kaavat ja yhtälöt, esimerkit, harjoitukset

- 1061
- 136
- Ronald Reilly
Eräs ykkös- F (x) funktio F(x) kutsutaan myös primitiiviseksi tai yksinkertaisesti mainitun funktion määrittelemätön integraali, jos tietyllä aikavälillä Yllyttää, Onko totta että F '(x) = f (x)
Otetaan esimerkiksi seuraava toiminto:
f (x) = 4x3
Tämän funktion antipää on f (x) = x4, koska johdetaan f (x): n johdannaisääntöjen avulla:

Se saadaan tarkalleen f (x) = 4x3.
Tämä on kuitenkin vain yksi monista f (x): n monista antiderivatiivista, koska tämä toinen funktio: g (x) = x4 + 2 Se on myös, koska johdettamalla g (x) x: n suhteen, se on sama, joka saadaan takaisin f (x).
Tarkistetaan se:
=4x^3)
Muista, että vakiosta johdettu on 0. Siksi termiin x4 Voit lisätä vakiona ja sen johdannainen on edelleen 4x3.
Johtopäätöksenä on, että yleisen lomakkeen f (x) = x funktio4 + C, missä C on todellinen vakio, toimii F (x): n antiderivisinä.
Aikaisempi havainnollistava esimerkki voidaan ilmaista seuraavasti:
df (x) = 4x3 Dx
Määrittelemätön antidervatiivinen tai integraali ilmaistaan symbolilla ∫, siksi:
F (x) = ∫4x3 dx = x4 + C
Missä funktio f (x) = 4x3 Sitä kutsutaan integroiva, ja c on Integraatiovakio.
[TOC]
Esimerkkejä antidervanitioista
Kuvio 1. Anti -Hotley ei ole muuta kuin määrittelemätön integraali. Lähde: Pixabay. Funktion antipäätoimituksen löytäminen on yksinkertaista joissain tapauksissa, joissa johdannaiset ovat hyvin tunnettuja. Esimerkiksi, ole funktio f (x) = Sen X, sen oppimattomana on toinen funktio F (x) siten, että johdettuna se saadaan f (x).
Tämä toiminto voi olla:
F (x) = - cos x
Tarkistetaan, että se on totta:
F '(x) = (- cos x)' =- (-sen x) = sin x
Siksi voimme kirjoittaa:
∫sen x dx = -cos x + c
Johdannaisten tuntemisen lisäksi on olemassa perus- ja yksinkertaisia integraatiosääntöjä, jotka löytyvät määrittelemättömästä antiDervativeista tai integroinnista.
Voi palvella sinua: peräkkäiset johdannaisetOle sitten todellinen vakio,:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Jos H (x) -funktio voidaan ilmaista kahden funktion summana tai vähentämisenä, sen määrittelemätön integraali on:
3.- ∫h (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
Tämä on lineaarisuuden ominaisuus.
Se Vallansääntö Integraaleille se voidaan perustaa tällä tavalla:

N = -1: n tapauksessa käytetään seuraavaa sääntöä:
5.- ∫x -1 Dx = ln x +c
On helppo osoittaa, että johdannainen ln x se on juuri x -1.
Differentiaaliyhtälöt
Differentiaaliyhtälö on sellainen, jossa tuntematon on johdannainen.
Nyt edellisestä analyysistä on helppo ymmärtää, että johdannaisen käänteinen toimenpide on määrittelemätön antiDervative tai Integraal.
Olkoon f (x) = y '(x), ts. Voimme käyttää seuraavaa merkintää osoittaaksesi tämän johdannaisen:
=y'(x)=\fracdydx)
Se seuraa heti:
dy = f (x) dx
Differentiaaliyhtälön tuntematon on funktio y (x), joka, jonka johdannainen on f (x). Sen puhdistamiseksi edellinen lauseke on integroitu molemmille puolille, mikä vastaa antidervatiivisen soveltamista:
∫Dy = ∫f (x) dx
Vasen integraali ratkaistaan integraatiosääntöllä 1, K = 1: n kanssa ja siten haluttu -Awaite puhdistetaan:
ja (x) = ∫f (x) dx = f (x) + c
Ja koska C on todellinen vakio, tietää, mikä on asianmukaista kussakin tapauksessa, lausunnossa on oltava riittävä lisätietoja C: n arvon laskemiseksi. Tätä kutsutaan Alkuolosuhde.
Näemme esimerkkejä kaiken tämän soveltamisesta seuraavassa osassa.
Voi palvella sinua: Täsmällinen arvioAntideriviset harjoitukset
- Harjoitus 1
Käytä integrointisääntöjä seuraavien määrittelemättömien antilivatiivisten tai toimintojen integraalien hankkimiseksi, yksinkertaistaen tuloksia niin paljon kuin mahdollista. On kätevää tarkistaa tulos johdannaisella.
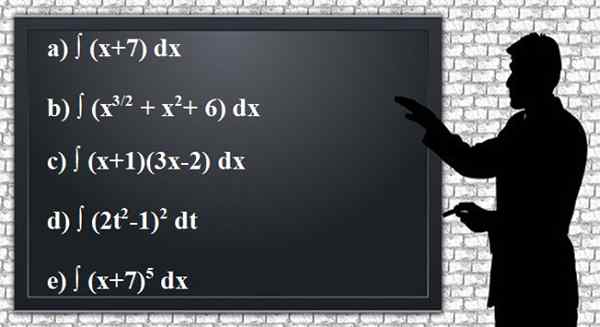 Kuva 2. Määritetyt anteesi- tai integraaliharjoitukset. Lähde: Pixabay.
Kuva 2. Määritetyt anteesi- tai integraaliharjoitukset. Lähde: Pixabay. Liittää jhk
Käytämme ensin sääntöä 3, koska integrointi on kahden termin summa:
∫ (x +7) dx = ∫ xdx +∫7dx
Ensimmäisen integraalin suhteen sovelletaan valtuuksien sääntöä:
∫ XDX = (x2 /2)+c1
Toisessa integraalissa sääntöä 1 sovelletaan, koska se on K = 7:
∫7dx = 7∫dx = 7x + c2
Ja nyt tulokset lisätään. Kaksi vakiota on ryhmitelty yhdeksi, yleisesti nimeltään C:
∫ (x+7) dx = (x2 /2) + 7x + c
Ratkaisu b
Lineaarisuudella tämä integraali hajoaa kolmeen yksinkertaisempaan integraaliin, joihin sovelletaan valtuuksien sääntöä:
∫ (x3/2 + x2 + 6) dx = ∫x3/2 Dx + ∫x2 dx +∫6 dx =

Huomaa, että jokaisesta integraalista integraatiovakio ilmestyy, mutta ne kokoontuvat yhdessä puhelussa C.
Liuos C
Tässä tapauksessa on kätevää soveltaa kertolaskun jakautuvaa ominaisuutta integroivan kehittämiseksi. Sitten käytät valtuuksien sääntöä löytääksesi jokaisen integraalin erikseen, kuten edellisenä vuonna.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Huomaavainen lukija huomauttaa, että nämä kaksi keskeistä termiä ovat samanlaiset, siksi ne vähenevät ennen integrointia:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Ratkaisu E
Tapa ratkaista integraali olisi voiman kehittäminen, kuten esimerkissä D tehtiin. Koska eksponentti on korkeampi, olisi tarpeen tehdä muuttuja muutos, jotta ei tarvitse tehdä niin pitkää kehitystä.
Voi palvella sinua: jatkuva satunnaismuuttujaMuuttujan muutos on seuraava:
U = x + 7
Johdetaan molemmille puolille tämä lauseke:
du = dx
Integraali muuttuu yksinkertaisemmaksi uuden muuttujan kanssa, joka on ratkaistu voimansääntöllä:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Lopuksi muutos palautetaan palaamaan alkuperäiseen muuttujaan:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Harjoitus 2
Hiukkas on alun perin levossa ja liikkuu X -akselia pitkin. Sen kiihtyvyys T> 0: lle annetaan funktiolla a (t) = cos t. Tiedetään, että t = 0, sijainti on x = 3, kaikki kansainvälisen järjestelmän yksiköissä. Hiukkasen nopeutta v (t) ja sijainti x (t) löydät nopeutta v (t) ja.
Ratkaisu
Koska kiihtyvyys on ensimmäinen nopeudesta ajankohtana, sinulla on seuraava differentiaaliyhtälö:
a (t) = v '(t) = cos t t
Seuraa, että:
v (t) = ∫ cos t dt = sin t + c1
Toisaalta tiedämme, että nopeus on puolestaan aseman johdannainen, siksi integroitumme uudelleen:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫sen t dt + ∫c1 dt = - cos t + c1 t + c2
Integraatiovakiot määritetään lausunnossa annettujen tietojen perusteella. Ensinnäkin hän sanoo, että hiukkas oli alun perin levossa, siksi v (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Sitten sinun täytyy x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + C2 = 3 → C2 = 3+1 = 4
Nopeus- ja sijaintitoiminnot ovat ehdottomasti tällaisia:
v (t) = sen t
x (t) = - cos t + 4
Viitteet
- Engler, a. 2019. Kiinteä laskenta. Rannikon kansallinen yliopisto.
- Larson, r. 2010. Muuttujan laskenta. 9NA. Painos. McGraw Hill.
- Ilmaiset matematiikan tekstit. Antiderivatiivi. Toipunut: matematiikka.Libretext.org.
- Wikipedia. Ykkös-. Haettu: vuonna.Wikipedia.org.
- Wikipedia. Määrittelemätön integraatio. Palautettu: on.Wikipedia.org.
- « 13 arvotyyppiä ja niiden merkitys (esimerkkien kanssa)
- Sähköpotentiaali kaava ja yhtälöt, laskenta, esimerkit, harjoitukset »