

Vektoritoiminnot
- 1418
- 47
- Gustavo Runte DVM
Mitkä ovat vektoritoiminnot?
Eräs vektoritoiminto parametri t, Se on funktio, jonka alue on todelliset arvot t, kun taas reitin muodostuu muodon vektorit r - (t-A. Tällainen funktio voidaan ilmaista seuraavasti:
r - (t) = f (t-A Yllyttää + g (t-A J - + H (t-A k -k -
Missä Yllyttää, J - ja k -k - Ne ovat yksikkövektoreita tilan kolmessa pääryhmässä, ja toiminnot F, G ja H ovat muuttujan todellisia toimintoja t. Merkintä käyttää rohkeaa vektorien suuruuden erottamiseksi.
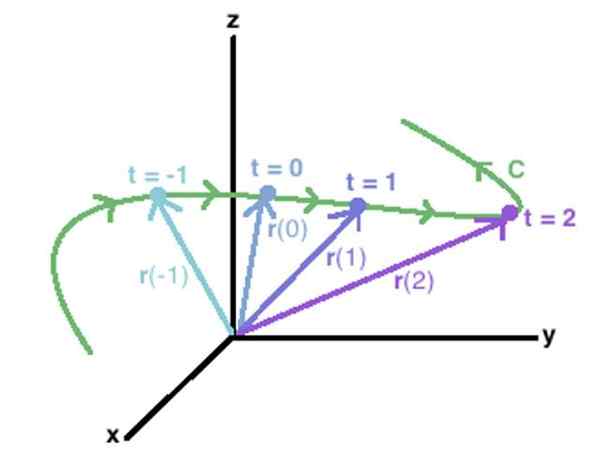 Avaruuden vektoritoimintoa voidaan käyttää kuvaamaan C -käyrää yhdistämällä kunkin vektorin äärimmäiset pisteet, jotka määritetään mainitulla funktiolla. Lähde: Wikidot.
Avaruuden vektoritoimintoa voidaan käyttää kuvaamaan C -käyrää yhdistämällä kunkin vektorin äärimmäiset pisteet, jotka määritetään mainitulla funktiolla. Lähde: Wikidot. Toinen tapa osoittaa vektorifunktiota on neliöhakeiden kautta:
r - (t) =
Vektoritoimintoja voidaan käyttää käyrien tutkimiseen tasossa ja tilassa, kuten liikkuva esinettä seuraavaa etenemissuuntausta. Esimerkki on projisoidun pallon kuvaama vertaus alkuperäisellä nopeudella, painovoimassa.
Jos haluat tietää pallon sijainnin jokaisen ajanjakson ajan t, Vektoritoiminto kahdella komponentilla, yksi vaakasuora ja yksi pystysuora:
r - (t) = x (t-A Yllyttää + ja(t-A J -
Molemmat x (t) kuten y (t) Ne ovat aikatoimintoja t. Siten kun liityt kunkin vektorin äärimmäisiin pisteisiin r -(t) Mahdollinen, muodosta vertaus, jonka pallo kuvataan tasolla Xy.
Konsepti ulottuu helposti avaruuden C -käyrälle, kuten yllä olevassa kuvassa. Vektorit ilmestyvät siinä r - (-1), r - (0), r - (1) r - (2), jonka päät piirtävät C -käyrän, piirretty vihreäksi.
Rajoitukset, johdetut ja integraali vektoritoiminnot
Laskentatyökaluja, joita sovelletaan todellisiin muuttuviin toimintoihin, voidaan soveltaa myös vektoritoimintoihin.
Voi palvella sinua: tekijäVektoritoiminnon raja
Vektoritoimintoraja r - (t) = f (t-A Yllyttää + g (t-A J - + H (t-A k -k -, Kun T → A, se on määritelty:
=\left%20[%20\displaystyle%20\lim_%20t\to%20a%20f(t)\right%20]\textbfi+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20g(t)\right%20]\textbfj+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20h(t)\right%20]\textbfk)
Olettaen, että F: n vastaavat rajat (t), G (t) ja H (t), kun t → a.
Johdettu vektoritoiminnosta
Vektorifunktiosta johdettu määritelmä r - (t) = f (t-A Yllyttää + g (t-A J - + H (t-A k -k - Se on analoginen todellisen muuttujan todellisen funktion johdannaisen kanssa. Kutsumus r -'(t) mainitulle johdannaiselle, sinulla on:
=\displaystyle%20\lim_\Delta%20t%20\to%200\frac\mathbfr(t+\Delta%20t)-\mathbfr(t)\Delta%20t)
Johdannainen on olemassa aina, kun edellinen raja on olemassa, ja jos on, funktio r -(t) on erilainen t.
Vektoritoiminnon integraali
Olla r - (t) = f (t-A Yllyttää + g (t-A J - + H (t-A k -k - vektoritoiminto, jolloin funktiot f, g ja h ovat integroitavissa t.
Niin:
dt%20=\left%20[%20\int%20f(t)dt%20\right%20]\mathbfi+\left%20[%20\int%20g(t)dt%20\right%20]\mathbfj+\left%20[%20\int%20h(t)dt%20\right%20]\mathbfk+\mathbfC)
Kanssa:
C = c1 Yllyttää + c2 J -
Mikä tarkoittaa, että integraatiovakio on myös vektori, mutta vakio.
Vektoritoimintoesimerkit
Esimerkki 1
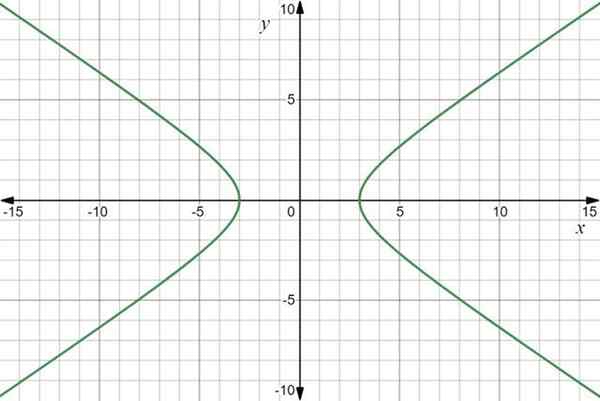
Sinulla on annettu vektoritoiminto r - (t) = 3 sekuntia t Yllyttää + 2TAN t J -. Se on mahdollista arvioida erilaisille t -arvoille, kuten t = π/4 ja t = π, aiheuttaen vektoreita r - (π/4) ja r - (π):
r - (π/4) = 3 sekuntia (π/4) Yllyttää + 2TAN (π/4) J - = 3√2 Yllyttää + 2 J -
r - (π) = 3 sekuntia (π) Yllyttää+2tan (π) J - = - 3 Yllyttää
kuitenkin, r - (t) Sitä ei ole arvoille t = ∓π/2, ∓3π/2, ∓5π/2…, koska SEC -funktio t = 1 /cos t Sitä ei ole määritelty, onko se niin t = SEN t / cos t.
Siksi r (t) -funktion alue on kaikki T: n todelliset arvot, paitsi muodon arvot:
∓ (2n+1) π/2; N = 0, 1, 2, .. .
Funktion kuvaaja on hyperbola:
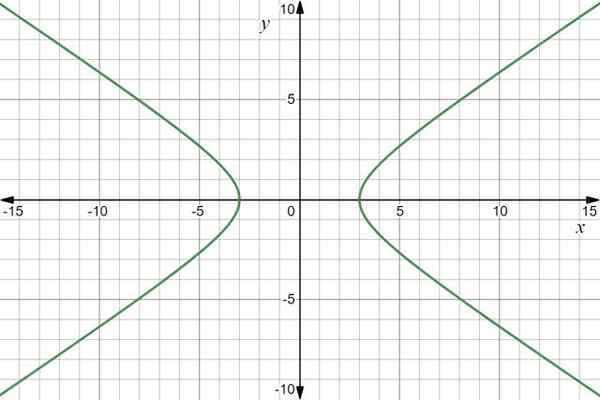 Vektoritoimintokaavio r - (t) = 3 sekuntia t Yllyttää+2 tan t J -. Lähde: f. Zapata Desmosin kautta.
Vektoritoimintokaavio r - (t) = 3 sekuntia t Yllyttää+2 tan t J -. Lähde: f. Zapata Desmosin kautta. Esimerkki 2
Kaltevassa ammuksen käynnistämisessä mobiili -sijainti on vektoritoiminto r - (t) = x (t-A Yllyttää + ja(t-A J - . Olettaen, että ilmankestävyys ei puutu ja että painovoima on ainoa voima, joka vaikuttaa matkapuhelimeen, vaakasuora liike on tasainen suorakulmainen, kun taas pystysuora kiihtyy tasaisesti, koska se on g = 9.8 m/s2 Kiihtyvyysarvo. Tämä kiihtyvyys on pystysuora kohti maata.
Voi palvella sinua: johdannaisäännöt (esimerkkien kanssa)Tässä tapauksessa toiminnot x (t) ja (t) Ne ovat vastaavasti:
- x (t) = xjompikumpi + vhärkä∙ T
- ja (t) = yjompikumpi + vOy∙ T - ½ GT2
Määrät vhärkä ja vOy Ne ovat vektorifunktion komponentteja, jotka kuvaavat liikkuvan nopeuden jatkuvasti:
v (t) = Vx(t-A Yllyttää + vja(t-A J -
Kanssa-
- vhärkä = vjompikumpi∙ cos θ
- vOy = vjompikumpi∙ Sen θ
Θ kulma, joka muodostaa alkuperäisen nopeuden vaakasuoraan nähden.
Se puolestaan matkapuhelimen alkuperäinen sijainti on koordinaattipiste (xjompikumpi,jajompikumpi) tai vastaavasti, asetettu sijaintivektori:
r -jompikumpi (t) = xjompikumpi Yllyttää + jajompikumpi J -
Huomaa, että esitetyissä yhtälöissä negatiivinen merkki on osoitettu pystysuuntaiseen suuntaan, joten y (t) -yhtälön kolmas termi ottaa sen. On myös mahdollista määrittää alkuperä matkapuhelimen alkuperäiselle sijainnille.
Ammuksen välitön nopeus
Hetkellinen nopeus V (t) on ensimmäinen asennosta, kun suhteessa. Se lasketaan soveltamalla tunnettuja johdannaisääntöjä:
v(t) = R ' (t) = [x (t-A Yllyttää + ja(t-A J --'= x '(t-A Yllyttää + ja'(t-A J = vhärkä Yllyttää + (VOy - Gt) J -
Nopeusmoduuli annetaan:

Ammuksen välitön kiihtyvyys
On tiedossa, että se on G pystysuunnassa ja suunnassa alaspäin. Tämä todennetaan tietäen, että kiihtyvyys on ensimmäinen nopeuden johdannainen ajan suhteen (tai aseman toinen johdannainen ajan suhteen, jos se on suositeltava):
-lla(t) = V ' (t) = [Vhärkä Yllyttää + (VOy - Gt) J -] '= [Vhärkä Yllyttää] '+ [(vOy - Gt) J -] '= = - g J -
Tämä on juuri odotettu tulos.
Liikuntaa
Ottaen huomioon vektoritoiminto r - (t) = 3T Yllyttää + (T - 1) J -, löytö R '(t) ja r "(T).
Ratkaisu
Johdannaisääntöjen soveltaminen jokaiseen komponenttiin, sinulla on:
Voi palvella sinua: Integraatiovakio: Merkitys, laskenta ja esimerkitR '(t) = = 3 Yllyttää + J -
Ja koska vakion johdannainen on 0-
r "(t) = 0 -
Tarkoittaen, r "(t) on yhtä suuri kuin nollavektori.
Viitteet
- Figueroa, D. 2005. Sarja: Tieteen ja tekniikan fysiikka. Osa 1. Kinematiikka. Toimittanut Douglas Figueroa (USB).
- Larson, r. Laskenta analyyttisellä geometrialla. Toinen. Painos. McGraw Hill.
- MathOnline. Vektoriarvoiset toiminnot. Toipunut: MathOnline.Wikidot.com.
- Aita. Laskensa tilavuus 3. Haettu osoitteesta: OpenStax.org.
- Purcell, E. J -. 2007. Laskeminen. Pearson -koulutus.