

Kulmaisen vauhdin määrä, säilyttäminen, esimerkit, harjoitukset
- 3603
- 301
- Alonzo Kirlin
Hän kulmavaihe o Kulmaliikkeen määrä on kiertoliikkeelle, mikä lineaarinen hetki on käännösliikkeelle. Se on vektorien suuruus, joka karakterisoi täsmällisen hiukkasen tai pidennetyn esineen kiertoa akselin ympärillä, joka kulkee pisteen läpi.
Tämä tarkoittaa, että aina kun kulmavirta lasketaan, kierto -akseli on määritettävä kätevästi.
Alkaen massan M -pisteestä, kulmavirta on merkitty Lens, lineaarinen hetki p ja hiukkasten sijainti suhteessa akseliin, joka kulkee tietyn pisteen läpi tai on r -, niin:
Lens = r - x p
Lihavoidut kirjaimet on varattu vektorien suuruuksille ja risti tarkoittaa, että kulmavirhe on vektorituote sijaintivektorin välillä r - ja lineaarinen hetki p hiukkasen. Vektorituotteesta johtuva vektori on kohtisuorassa osallistuvien vektorien muodostamaan tasoon nähden.
Tämä tarkoittaa, että suunta ja tunne Lens Ne voidaan löytää ristituotteen oikeanpuoleisen säännön mukaan.
Kansainvälisessä yksikköjärjestelmässä kulmavallan yksiköt ovat kg⋅m2/s, joilla ei ole erityistä nimeä. Ja laajennetulle rungelle, joka koostuu monista hiukkasista, edellinen määritelmä on kätevästi laajennettu.
[TOC]
Kulma -liikkumisen määrä
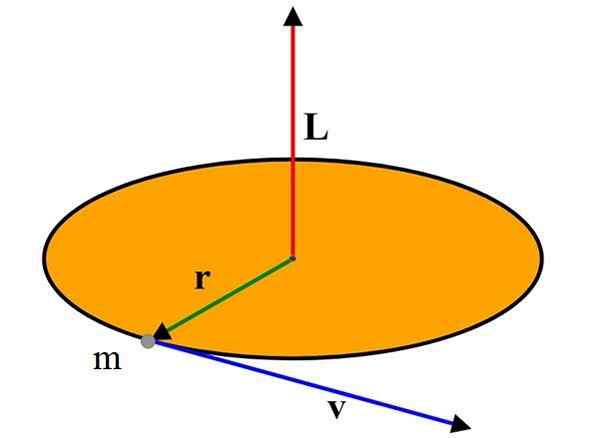
Kulmavirtavektorien välinen suhde tietyn pisteen tai lineaarisen ajan suhteen ympyrässä liikkuvan täsmällisen hiukkasen suhteen. Lähde: Muokattu f. Zapata Wikimedia Commons. Kulmaisen vauhdin vektorin suuruus on vektorituotteen määritelmän mukaan:
L = r⋅m⋅V⋅sen ϕ = mv (r⋅sen ϕ) = mvℓ
Missä ϕ on vektorien välinen kulma r - ja v. Sitten ℓ = r Sen ϕ on kohtisuora etäisyys linjan välillä v Ja kohta tai.
Hiukkasten tapauksessa, joka liikkuu kuvaamaan ylemmässä kuvassa esitettyä kehää, tämä kulma on 90º, koska nopeus on aina tangentti kehälle ja siksi kohtisuorassa säteen suhteen.
Siksi sen 90º = 1 ja Lens On:
L = m⋅r⋅V
Hitaushetki
Jäykän rungon hitausmomentti kuvaa kehon hitausta tiettyjen akselien ympäri kiertoa vasten.
Se riippuu paitsi kehon rungosta, myös etäisyydestä kierto -akseliin. Tämä on helposti ymmärrettävää ajatellessasi, että joillekin esineille on helpompi kiertää joidenkin akselien suhteen kuin toiset.
Hiukkasjärjestelmälle on annettu: I -kirjaimella merkitty hitausmomentti:
Voi palvella sinua: kulmakiihtyvyysI = ∑ rYllyttää2 ΔMYllyttää
Missä ΔMYllyttää Se on pieni osa taikinasta ja rYllyttää Se on sen etäisyys kierto -akselista. Laajennettu runko koostuu lukuisista hiukkasista, joten sen kokonaismiehen momentti on kaikkien massan ja etäisyyden välisten tuotteiden summa, jotka säveltävät sen säveltäviä hiukkasia.
Jos se on laajennettu runko, kesä muuttuu olennaiseksi ja ΔM Siitä tulee massaero Dm. Integraatiorajat riippuvat objektin geometriasta:
I = ∫M (R2) DM
Hitausmomentin käsite liittyy läheisesti laajennetun esineen kulmavirtaan, kuten näemme silloin.
Hiukkasjärjestelmän kulmavirta
Harkitse hiukkasjärjestelmää, joka koostuu massasta ΔMYllyttää joka pyörii ympyrän jälkeen tasossa Xy, Jokaisella on lineaarinen nopeus, joka liittyy sen kulmanopeuteen, jälkimmäinen kaikille hiukkasille:
vYllyttää = ΩrYllyttää
Missä rYllyttää Se on etäisyys kierto -akseliin tai. Joten kulman vauhdin suuruus on:
LensYllyttää = ΔMYllyttää. r -Yllyttää. (ΩrYllyttää) = r -Yllyttää2Ω ΔMYllyttää
Järjestelmän kulmavirta annetaan summan mukaan:
L = Ω ∑ rYllyttää2 ΔMYllyttää
Tunnistamme nopeasti hitausmomentin, sellaisena kuin se on määritelty edellisessä osassa, ja siksi sen kulman vauhdin suuruus pysyy näin:
L = iω
Kuten olemme sanoneet, että hiukkasjärjestelmä oli XY -tasossa, käy ilmi, että kulmavirta on suunnattu Z -akselia pitkin, kohtisuorassa mainittuun tasoon nähden. Merkitys annetaan kierto: kulma hetki.
Laajennettu runko voidaan jakaa viipaleihin, jokaisella on kulmavaihe L = iω ohjattu Z -akselia pitkin. Jos objektin symmetria -akseli osuu samanaikaisesti Z -akselin kanssa, ei ole ongelmaa, koska jopa pisteillä, jotka eivät ole XY -tasossa, kulmavallan komponentit kohtisuorassa mainitulle akselille peruutetaan.
Vektorisesti:
Lens = IΩ
Tämä yhtälö pätee kolmeen dimensioiseen objektiin, jotka pyörivät symmetria -akselin ympärillä.
Kun kulmavirta vaihtelee?
Kun nettovoima vaikuttaa hiukkasiin tai runkoon, sen lineaarinen hetki voi muuttua, ja näin ollen se tekee myös kulmavallan. Tiedämme, milloin vaihtelemme, käytämme johdannaista, mikä antaa meille muutoksen nopeuden ajan myötä, jos on:
Voi palvella sinua: piisoksidi (SiO2): rakenne, ominaisuudet, käyttö, hankkiminen)
Johdannaisen tuotesäännön soveltaminen:
+\left&space;(\mathbfr\times&space;\fracd\mathbfpdt&space;\right&space;))
Termi v x mv Se on tyhjä, koska se on vektorin tuote itsensä kanssa, ja toisella termillä löydämme verkkovoiman F = m-lla, siksi:

Vektorituote r - x F Se ei ole muuta kuin verkon vääntö, joskus merkitty kreikkalaisten sanoitusten kanssa τ tai niin M, Aina rohkea, koska se on vektorimääräinen määrä. Sitten analogisesti lineaarisen momentin kanssa kulmavaihe vaihtelee niin kauan kuin nettokilluksen vääntömomentti tai hetki:
d -dLens/dt = M
Kulman vauhdin suojelu
Edellisistä osioista olemme nähneet, että:
d -dLens/dt = M
Toisin sanoen kulmavirta vaihtelee, kun on hetki verkon vääntö. Jos verkon vääntö ei ole hetkeä, niin:
d -dLens/dt = 0 → L se on vakio
Toisin sanoen:
Alkukulman momentti = lopullinen kulmavirta
Tämä tulos on edelleen voimassa siinä tapauksessa, että ruumis ei ole jäykkä, kuten seuraavissa esimerkeissä näemme.
Esimerkit
Kulmainen vauhti on tärkeä suuruus, joka paljastuu lukuisissa tilanteissa, mikä osoittaa kuinka universaali se on:
Taiteellinen luistelu ja muut urheilulajit
 Vasemmalla puolella luistelija alkaa kääntyä pidennetyillä käsivarsilla, oikealle, kutistaa kädet vartaloa vasten ja ylittää jalat lisätäkseen sen käännöksen nopeutta. Lähde: Wikimedia Commons.
Vasemmalla puolella luistelija alkaa kääntyä pidennetyillä käsivarsilla, oikealle, kutistaa kädet vartaloa vasten ja ylittää jalat lisätäkseen sen käännöksen nopeutta. Lähde: Wikimedia Commons. Aina kun vartalo, joka kääntää sopimuksia, sen pyörimisnopeus kasvaa, tämä tuntee luistelijat hyvin.
Tämä johtuu siitä, että kun supistamme käsivarret ja jalat, hitausmomentti pienenee, kun sen osien välinen etäisyys pienenee, mutta kun kulmavirta säilyy, Iω -tuotteen vakiona pitämiseksi kulmanopeuden on kasvatettava.
Tämä pätee paitsi luisteluun, myös urheiluun ja aktiviteetteihin, joissa käännösten on.
Kissat seisovat

Kissat korjaavat ne aina laskeutumaan neljään, kun ne putoavat. Vaikka heillä ei olisi määrää alkuperäistä liikettä, he varmistavat, että he kääntävät nopeasti jalat ja hännän muuttaakseen kiertohitaansa ja kiinnittämään ne seisomaan.
Samoin liikennettäessä heidän kulmavirta on tyhjä, koska niiden kierto ei ole jatkuvaa.
Frisbeen liike

Frisbee on käynnistettävä tulostamalla se lentämään, koska muuten se putoaa. Itse asiassa kulma hetki.
Se voi palvella sinua: paikallaan olevat aallot: kaavat, ominaisuudet, tyypit, esimerkitUrheilun pallot

Baseball, jalkapallo, koripallo ja muut urheilupallot ovat kulmavaiheet. Koska ne ovat pallomaisia, heillä on hetki hitausta ja pelin aikana heitä pyöritetään. Koska pallon hitaushetki on:
I = (2/5) MR2
Missä m on pallon massa ja r sen säde, hitausmomentti tiettyyn akseliin (kiinteä) on:
L = (2/5) MR2Ω
Kuu -kiinnike
Kuu on siirtymässä pois maasta, koska maan pyörimisnopeus pienenee suurten vesimaisten ja meren taustan välisen kitkan vuoksi.
Earth-Luna -järjestelmä säilyttää kulman hetkensä.
Atomi
Bohrin atomimallin ensimmäinen postulaatio toteaa, että elektroni vie vain kiertoratoja, joissa kulmavaihe on kokonainen monikerros H/2π, Missä H on Planckin vakio.
Liikuntaa
Ohut terästanko on massa 500 g ja pituus 30 cm. Kiertää akselin ympäri, joka kulkee keskuksensa läpi nopeudella 300 kierrosta minuutissa. Määritä sen kulmamäärän moduuli.
Ratkaisu
Tarvitsemme sauvan hitausmomentin, joka viittaa akseliin, joka kulkee sen keskuksen läpi. Hitauden vauhtia on todettu, että:
I = (1/12) ml2 = (1/12) × 0.5 kg x (30 × 10-2 m)2 = 3.75 × 10-3 kg.m2
Koska se on laajennettu runko, jonka tiedämme kulmanopeuden, käytämme:
L = iω
Ennen kuin muutamme kulmanopeutta tai kulmataajuutta Ω radianeille/s:
Ω = (300 kierrosta/minuutti) × (1 minuutti/60 sekuntia) x (2π radians/vallankumous) = 10 π rad/s
Korvaus:
L = 3.75 x10-3 kg⋅m2 × 10 π rad/s = 0.118 kg⋅m2 / s
Viitteet
- Bauer, W. 2011. Fysiikka tekniikkaan ja tieteisiin. Osa 1. MC Graw Hill.
- Giambattista, a. 2010. Fysiikka. Toinen. Ed. McGraw Hill.
- Giancoli, D. 2006. Fysiikka: sovellusten periaatteet. Kuudes. Ed Prentice Hall.
- Ritari, r. 2017. Tutkijoiden fysiikka ja tekniikka: strategialähestymistapa. Pearson.
- Serway, R., Jewett, J. (2008). Fysiikka tieteen ja tekniikan fysiikka. Osa 1. Seitsemäs. Ed. Cengage -oppiminen.
- Tippens, P. 2011. Fysiikka: Käsitteet ja sovellukset. 7. painos. McGraw Hill.
- « Afrikan edustavien lajien lattia ja eläimistö
- Rault -periaate ja kaavalaki, esimerkit, harjoitukset »