

Oravahäkkimoottori
- 1915
- 3
- Juan Breitenberg V
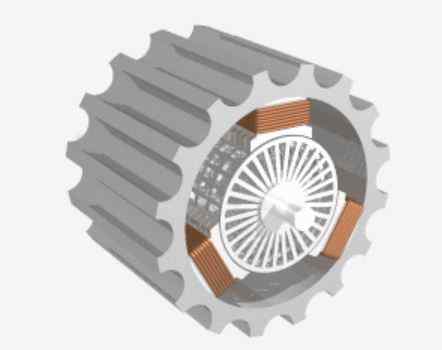
Kuvio 1. Kaavamainen moottorin esitys Squirrel Cage. Lähde: Wikimedia Commons. Mikä on oravahäkkimoottori?
Oravahäkkimoottori on induktio sähkömoottori, jonka kierto- tai roottorin osa muodostuu johtavien tankojen sarjassa aksiaalisuunnan suuntaisesti ja järjestetty sylinterimäisessä muodossa akselin ympärillä.
Tämä lomake muistaa häkin, kuten ne, joita käytettiin oravien saamiseksi Pohjois -Amerikan vanhassa lännessä, siis nimi. Ne ovat myös roottorin halvimpia, kestäviä ja pienempiä huoltoa hiilien, harjojen tai keräilijöiden puutteen vuoksi, jota ei tarvitse kytkeä sähköisesti mihinkään ulkoisen virran lähteeseen.
Ensimmäiset pyörivät kenttämoottorit suunniteltiin vuosina 1885–1886 itsenäisesti kahdella suurella sähkögeenillä: Galileo Ferraris ja Nikola Tesla. Nämä moottorit olivat nykyisten oravahäkkimoottoreiden edeltäjät.
Oravahäkkimoottori on vuorotteleva virta, joka voi olla kolmivaiheinen, kaksisuuntainen tai yksivaiheinen. Ruokatyypin mukaan muotoilu voi vaihdella hiukan, mutta toiminnan periaate on aina sama.
Moottorin oravahäkki
Operaatioperiaate perustuu kiertomagneettikentän muodostumiseen moottorin keskellä, staattisella käämityksellä sen reuna -alueella, jota syötetään vuorottelevalla virralla.
Tämä pyörivä magneettikenttä indusoi virrat roottorin häkin muodostavissa palkeissa, ja nämä virrat vuorostaan tuottavat toissijaisen magneettikentän, joka on vuorovaikutuksessa ensisijaisen kentän kanssa, tuottaen vääntömomentin tai hetken roottorilla.
Avain toimintaan on pyörivän magneettikentän tuotannossa kohtisuorassa kierto -akseliin nähden. Tämä kiertokenttä on magneettinen vääntövoima häkin pitkittäispalkkeihin, kun virta kiertää.
Virran tuottamiseksi johtavissa tankoissa häkin kierto -akselin suuntaisesti yhdensuuntainen ulkoista virran lähdettä ei vaadita, koska itse kiertokenttä magneettisen induktion avulla kykenee indusoimaan virran häkkipalkkeissa.
Voi palvella sinua: Lämpötasapaino: Yhtälöt, sovellukset, harjoituksetEttä niin kauan kuin magneettikentän pyörimisnopeuden ja roottorin pyörimisnopeuden välillä on ero.
Pyörivä magneettikenttä kolmivaiheisessa moottorissa
Oravahäkkimoottorit voivat olla kolmivaiheisia tai yksivaiheisia. Kolmen vaiheen moottorin, toisin sanoen, joka toimii vuorottelevan virran kanssa kolmen vaiheen kanssa, jokainen vaihe etenee edelliseen 120º: ssa, toisin sanoen kolmasosa jaksosta.
 Kuva 2.- Animaatio, joka näyttää pyörivän magneettikentän, joka johtuu kolmen vanhentuneen 120º yksittäisten kenttien päällekkäisyydestä ja syötettiin kolmivaiheinen virra. Lähde: Wikimedia Commons.
Kuva 2.- Animaatio, joka näyttää pyörivän magneettikentän, joka johtuu kolmen vanhentuneen 120º yksittäisten kenttien päällekkäisyydestä ja syötettiin kolmivaiheinen virra. Lähde: Wikimedia Commons. Jokaisessa sähkömoottorissa kaksi osaa erotetaan:
- Staattori, Moottorin oheisosa, joka on kiinnitetty sen koteloon.
- Roottori, Moottorin keskuskierroksen osa.
Staattorissa on paketti ura- ja emaloituja arkkeja (loisten tai foucault -virtojen välttämiseksi) ja korkea magneettinen läpäisevyys.
Urat ohittavat eristävällä lakalla peitetyt kaapelit, jotka muodostavat vähintään kolme käämiä tai keloja, vanhentuneet 120º. Kolme kelaa syövät kolmen vaiheen vaihtovirtalla ja kukin vaihe myös 120º: ssa edelliseen suhteessa.
Joka hetki magneettikenttien superpositio antaa tuloksena olevan kentän kohtisuoraan moottorin kierto -akseliin nähden. Ajan edetessä kolmen kelan yhdistetty magneettikenttä ylläpitää sen amplitudia, mutta sen suunta on aina kohtisuorassa pyörimisakseliin nähden, pyörii taajuudella yhtä suurena kuin vuorottelevan virran, yleensä välillä 50 - 60 Hz.
Oravahäkki roottori
Se koostuu kahdesta johtimesta, jotka on kytketty kahdeksalla tai useammalla pitkittäisellä johtavalla tangolla, vuorokauden akselin suuntaisesti.
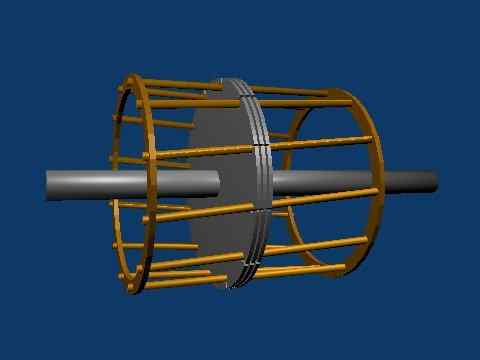 Kuva 3. Oravahäkki roottori. Lähde: Wikimedia Commons.
Kuva 3. Oravahäkki roottori. Lähde: Wikimedia Commons. Roottorin vääntömomentti
Ymmärtääksesi, kuinka kiertokenttä tuottaa vääntömomenttia häkissä, voit kuvitella vähimmäishäkin, joka koostuu kahdesta halkaisusta vastakkaisesta pitkittäispalkista.
Voi palvella sinua: Sähkömagneettinen energia: kaava, yhtälöt, käytöt, esimerkitKun tämä häkki on alun perin levossa ja elektromotiivivoiman ansiosta, sen ylittävä kiertokenttä indusoi kuormituksen liikkeen jokaisessa palkissa. Koska tangot ovat kuitenkin lyhyen piirin päissä johtavalla vanteella, perustetaan vastakkaisten palkkien välinen virran kierto.
Toisaalta, kun palkkien liike on suhteessa staattorin kenttään, niihin ilmestyy magneettisen alkuperän voima, joka tunnetaan nimellä Lorentzin voima, joka on kohtisuorassa staattorin säteittäiseen kenttään ja virran suuntaan jokaisessa baari.
Pylväiden virran ja vääntömomentin vuoksi on välttämätöntä, että heillä on suhteellinen liike suhteessa staattoriin tuotettuun radiomagneettikenttään.
Siksi häkin pyörimisnopeus on aina pienempi kuin magneettikentän. Tämän synkronian puutteen vuoksi roottorin ja kentän välillä tämä on asynkroninen moottori.
Siksi jokaisessa palkissa on pari vastakkaista voimaa, joka tuottaa vääntömomentin yksinkertaistetussa häkissä ja samalla tavalla yli kahden palkin häkkien kanssa.
Rautaydinroottori
Parannus koostuu puun asettamisesta upotettuna sarjaan rullattuihin ja emaloituihin levyihin, jotka on valmistettu korkeasta magneettisesta läpäisevyysmateriaalista, kuten rauta.
Tarkoituksena on kertoa sekä staattorin ja itse roottorin tuottamien magneettikenttien voimakkuus. Kumomentti tuotetaan näiden kahden kentän välisen vuorovaikutuksen ansiosta roottorilla.
Kokemus on osoittanut, että jos häkkipalkkeilla on jonkin verran vinoa kierto -akseliin, moottorilla on pehmeämpi toiminta pienemmällä värähtelyllä.
Suurempi kuormitus roottorissa, roottorin liukunopeus suhteessa staattorin magneettikentän pyörimisnopeuteen kasvaa myös. Siksi enimmäisvirrat ja enimmäismomentit tapahtuvat roottorin lukittuessa, minkä vuoksi ylikuormitettu moottori voi kärsiä ylikuumenemisesta ja siksi lakojen vaurioista ja kelojen ja roottorin ytimen muodostavat levyt ja eristävät emalit ja roottorin levyt, jotka muodostavat levyt ja roottorin ytimet.
Se voi palvella sinua: mikä on Prandtl -numero? (Kaasujen ja nesteiden arvot)Motorisovellusten oravahäkki
Kolmen vaiheen oravahäkkimoottorit ovat edullisia teollisiin sovelluksiin. Niitä suositellaan vähemmän kotimaisissa käytöissä, joissa asynkroninen yksivaiheinen moottori on edullinen, koska kolmen vaiheen virta ei yleensä saavuta asuntoja.
Keskipakopumput
Oravahäkkimoottorit ovat edullisia keskipakopumppuihin.
Tornot ja jyrsintäkoneet
Ne ovat myös ihanteellisia suurissa sorvi- ja jauhekoneissa, samoin kuin teollisuudenaloilla, joilla vaaditaan kuljettimen ja puhaltavien nauhojen.
Leikkaa ja leikata arkkia
Tämäntyyppiset moottorit sopivat trocales- ja metallilevyjen raskaaseen teollisuudelle.
Edut
Oravahäkkimoottoreilla on lukuisia etuja muun tyyppisiin sähkömoottoreihin nähden:
- Tehon tasa -arvossa oravahäkkimoottorit ovat kompaktimpia ja pienemmät kuin synkroniset moottorit.
- Ne ovat täysin skaalautuvia, eli ne voidaan rakentaa pienestä erittäin suureen.
- Oravahäkkimoottorien vääntömomentti tai kiertomomentti on yleensä korkeampi kuin muun tyyppiset moottorit, erittäin sopiva raskaaseen käyttöön.
- Kolmen vaiheen oravahäkkimoottorien tehokkuus on yli 70%. Asynkronisilla yksivaiheisilla moottoreilla on alhaisempi suorituskyky, mutta aina korkeampi kuin suoravirtamoottorit.
- Tehoelektroniikan kehityksen vuoksi on mahdollista hallita tällaisten moottorien nopeutta sähköisesti vaihtaen virran taajuutta.
Haitat
Tärkeimpien haittojen joukossa voidaan mainita:
- Aloitushetkellä induktiomoottoreilla on suuri virran kysyntä, joten niitä ei ole tarkoitettu sovelluksille, joissa moottorin on jatkuvasti aloitettava ja lopetettava, koska se tarkoittaisi ylikuormitusta sähköjärjestelmässä.
- Jopa silloin, kun tehoelektroniikka on edennyt, sen pyörimisnopeus ei ole yhtä hallittavissa kuin moottorien ohimennen.
Viitteet
- Asynkroniset tai induktiokoneet. Toipunut: Bibing.meille.On
- Martínez J. Induktiomoottorin ja sen toimintaperiaatteen osat. Haettu osoitteesta: Machinafers4.Tiedostot.WordPress.com
- Rosales J. Sähkömoottorit teollisuudelle. Haettu: USMP.Edu.PE -PE
- Wikipedia. Oravahäkki. Palautettu: on.Wikipedia.com
- Wikipedia. Asynkroninen moottori. Palautettu: on.Wikipedia.com